

写真:Nicolas Genoud- Geko Expeditions
人間は、少なくとも4000年間、おそらくもっと長い間、広大な陸地と外洋を航行してきました。 海での航行方法を開発したと記録された最初の西洋文明は、2000年頃から太陽と星のチャートと観測を使用して位置を見つけ、移動方向を決定したフェニキア人でした。 時間と歴史の進歩と人間の創意工夫により、技術が発見され、人々が遠い未知の距離をナビゲートする能力を継続的に改善するために開発された技術として、絶え間ない革新の流れがもたらされました。

初期の楽器
緯度は、星によるナビゲーションによってかなり簡単に見つけることができます。北半球では、船員は地平線より上の北の星の高度を測定することにより、現在の位置の緯度を見つけることができました。度単位のこの角度は、船の緯度でした。 「アイスランドのサンストーン」は、曇りや雪の状態で太陽を見つけるために使用されたと言われている鉱物の一種で、太陽を見るために使用されるときに太陽光を偏光し、方位角を決定することで、初期の船員がナビゲートしやすくします。さまざまな条件の太陽によって。
セクスタント-https://en.wikipedia.org/wiki/Sextant#/media/File:Sextant.jpg
最初の人工ナビゲーション技術のXNUMXつは、現代の磁気コンパスの祖先であるマリナーズコンパスでした。 これらの初期の羅針盤は、真北と磁北の違い、および磁気変動の違いが理解されなかったため、信頼性が低いとしばしば見なされていました。

アイスランドのサンストーン– https://en.wikipedia.org/wiki/Iceland_spar#/media/File:Silfurberg.jpg
13世紀の間、船員は航海の詳細な記録を記録し始め、これらの記録を海図に変換し、最初の海図を作成しました。 初期のチャートは不正確でしたが、それでも価値がありました。 これらのチャートには緯度や経度は表示されていませんが、主要な目的地間の移動のコンパスの方向を示すマーキングがありました。

マリナーズアストロラーベc.1645 https://en.wikipedia.org/wiki/Sextant#/media/File:Sextant.jpg
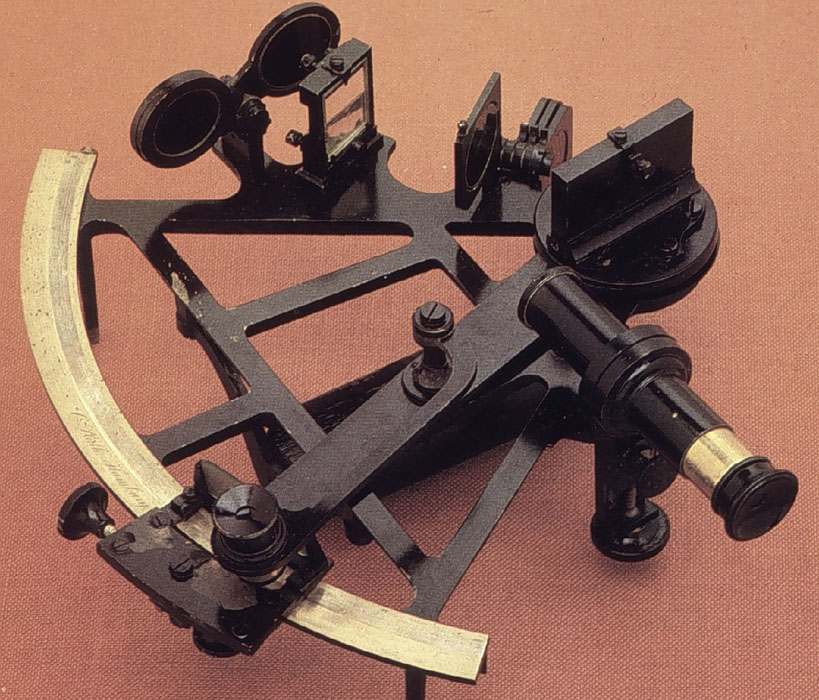
船員が緯度を決定するために使用した最初の機器のいくつかは、アストロラーベと象限儀でした。 アストロラーベは古代ギリシャで発明され、当初は天文学者が時間を知るために使用されていましたが、1730世紀の船員によって太陽と星の位置を測定し、緯度を決定するために使用されました。 1757年頃、世界中のXNUMX人の男性、イギリスの数学者ジョンハドレーとアメリカの発明家トーマスゴッドフリーがそれぞれ独立にオクタントを発明しました。これにより、船員は地平線と太陽、月、または緯度を計算するための星。 この楽器は後に、XNUMX年に最初の六分儀を生成する修正された設計を提案した提督ジョンキャンベルによってさらに開発されました。
この間ずっと、緯度を決定するためのツールが利用可能でしたが、経度はより困難であり、推定することしかできず、測定することはできませんでした。経度は、開始場所と新しい場所の間の時刻の差を比較することによって計算されましたが、 10世紀では、最も正確な時計でさえ、150日あたり最大XNUMX分を失う可能性があり、位置の計算で最大XNUMXマイル以上の不正確さが生じる可能性があります。
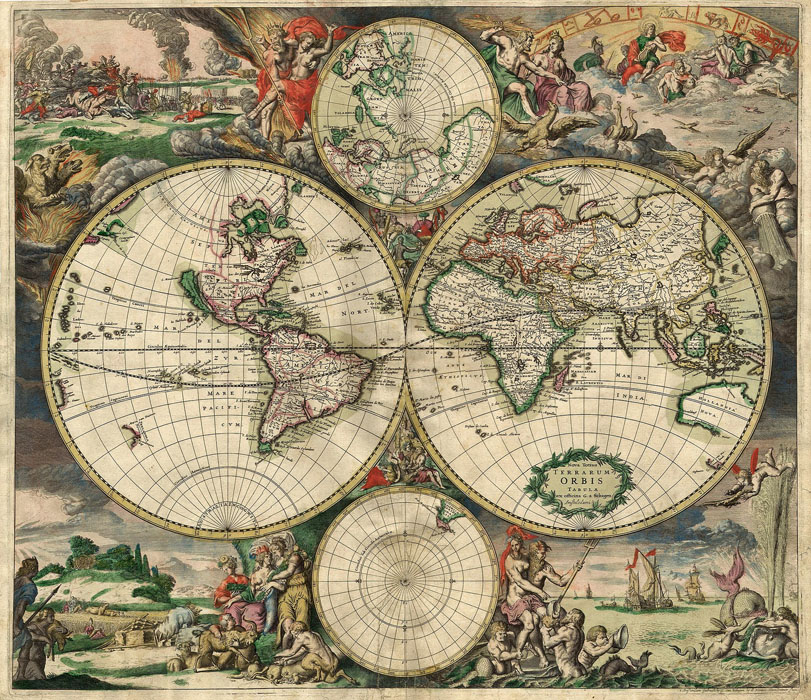
https://en.wikipedia.org/wiki/History_of_navigation#/media/File:World_Map_1689.JPG
しかし、1764年の正確なクロノメーターの発明は、最終的に経度を計算する正確な手段を提供しました。 1884年、イギリスのグリニッジを通過する子午線として(子午線上に位置する)子午線が国際的に確立されました。

レーダーナビゲーション-https://en.wikipedia.org/wiki/Radar_navigation#/media/File:Radar_screen.JPG
モダンナビゲーション
20世紀は、従来の計器の使いやすさを進化させ続け、レーダー、電波ビーコン、ジャイロスコープコンパス、全地球測位システムなど、いくつかの重要な新技術をナビゲーションにもたらしました。
ジャイロコンパスは1907年に発明され、外部磁場の影響を受けず常に真北を指すという点で、磁気コンパスよりも優れています。 最初の無線探知測距(レーダー)システムは1935年にサービスが開始され、電波を跳ね返すことにより、視界の範囲外にある物体を見つけるために使用できました。

ジャイロコンパスの断面図https://en.wikipedia.org/wiki/Sextant#/media/File:Sextant.jpg
1940年から1943年にかけてアメリカでは、「ロングレンジナビゲーション(ロラン)」と呼ばれるナビゲーションシステムが開発され、多数の「ステーション」間でパルス無線信号を使用して船の位置が特定されました。これは数百メートルまで正確でしたが、さまざまなステーションの場所によるカバレッジ。
20世紀の終わりに向かって、全地球測位システムがロランに取って代わるようになりました。 GPSシステムは、ロランの場合と同じように、別々の信号と同じ時間差の原理を使用しますが、GPSの場合、信号は地球を周回する衛星から送られます。 今日、GPSコンステレーションには合計24個の衛星があります。 また、24の運用GLONASS衛星、GLObal NAvigation Satellite System」は、ロシアの宇宙ベースの衛星ナビゲーションシステムです。 また、24基のガリレオナビゲーション衛星があります。ガリレオは、2016年に稼働したヨーロッパのグローバルナビゲーション衛星システムです。
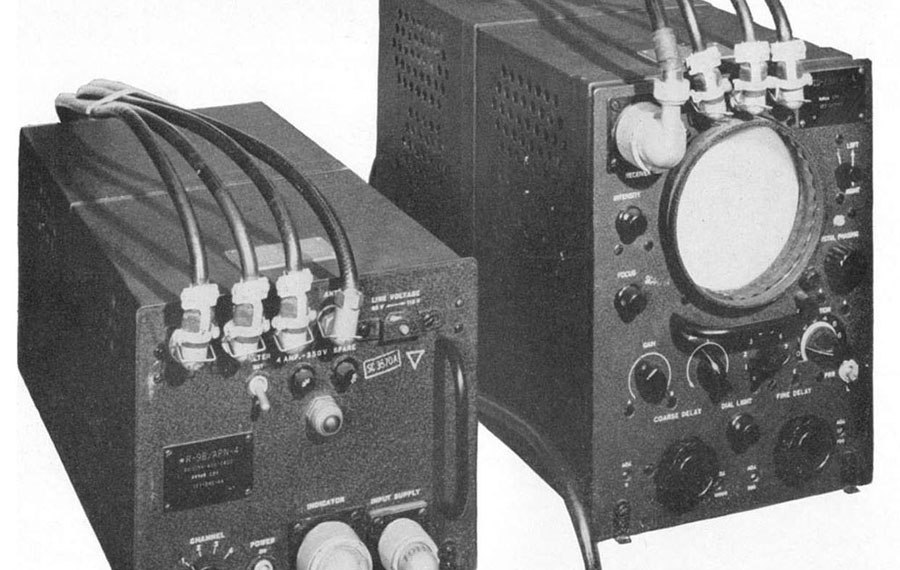
ロランナビゲーションシステム– https://en.wikipedia.org/wiki/LORAN#/media/File:LORAN_AN-APN-4_receiver_set.jpg
GPS / GLONASS / Galileoは、グローバルナビゲーションの最も正確な手段です。 GPSの精度は最大1メートルです。 今日、船員と陸上探検家の両方が使用する最新のGPSシステムは、GPSやGLONASS衛星からの信号を使用しています。

初期のGPS衛星– https://www.researchgate.net/figure/Illustration-of-the-Navigation-Technology-Satellite-2-NTS-2-The-satellite-included_fig1_258812899

世界初のポータブルGPSシステム-https://en.wikipedia.org/wiki/Global_Positioning_System#/media/File:Leica_WM_101_at_the_National_Science_Museum_at_Maynooth.JPG
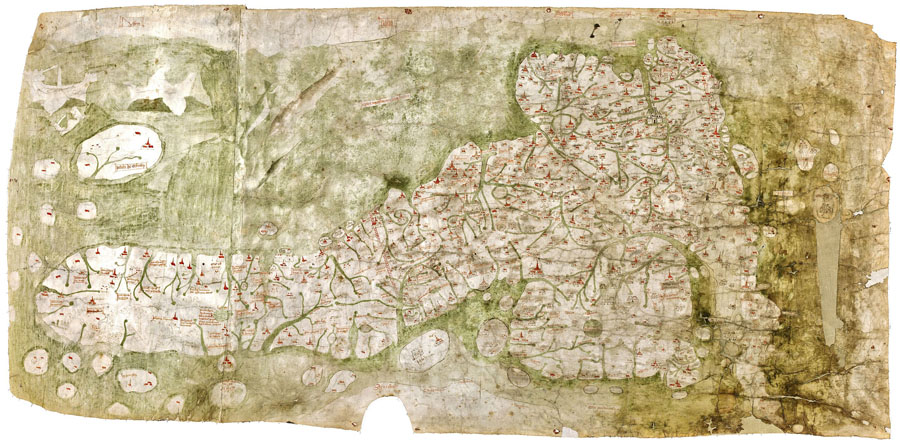
ガフマップ-https://en.wikipedia.org/wiki/Gough_Map#/media/File:Gough_Kaart_(hoge_resolutie).jpg

イランのアストロラーベ– https://en.wikipedia.org/wiki/Astrolabe#/media/File:Iranian_Astrolabe_14.jpg

写真:Aleksander Veljkovic
FOX-7オフロードGPS

私たちの読者は、よく知られていない地域やオフロードトラックを探索するときによく使用され、頼りにされている私たちの頼りになるナビゲーションシステム、つまりFOX-7オフロードナビゲーションシステムに精通しています。 Navigattor.com。 Fox 7には、携帯電話やタブレットで利用できる測位よりも10倍正確な高ゲインGPSレシーバーがあります。

これらのユニットはオフロードナビゲーションに最適なので、頑丈で信頼性が高く、バイクやクワッド、オフロード車両で使用できます。 オフロードナビゲーションは、OziExplorerアプリによって実行されます。 Navigattor.
OziExplorerの世界的な地形図は、の所有者は無料です Navigattor GPSデバイスであり、注文時にリクエストによりデバイスにプリインストールされます Navigattor.
初期のマリナーと同様に、チャート上に不明なルートをマークするOziExplorerアプリを使用すると、ウェイポイントとトラックファイルをGPX形式でロードしたり、アップロードしたり、ルートをエクスポートして他のユーザーと共有したりできます。
のチーム Navigattor は、利用可能な世界規模の地形図についてアドバイスし、FOX-7ユニットを送り出す前に、必要なマップをデバイスにプリインストールすることもできます。
ナビゲーションシステムは長い道のりを歩んでおり、そのような頑丈で信頼性の高いデバイスに圧縮されたテクノロジーの量は印象的です。 FOX-7の詳細については、 Navigattor。com。

![]()





{kind=link}
最近のコメント